Capteur ultrasonique 2
Le capteur ultrasonique 2 peut être utilisé pour détecter la distance entre un obstacle et lui. Le transmetteur à gauche émet des ondes ultrasonores, et le récepteur à droite reçoit les ondes ultrasonores réfléchies.


Comparé au capteur ultrasonique que nous avons développé précédemment, le capteur ultrasonique 2 est amélioré dans son boîtier, sa puce et ses LED bleues. Les LED bleues peuvent augmenter le potentiel d'expression émotionnelle et d'interaction.
Comparaison des capteurs ultrasoniques
| Capteur ultrasonique 2 | Capteur ultrasonique | |
|---|---|---|
| Boîtier en plastique pour améliorer la durabilité et la qualité | Oui | Non |
| Puce intégrée pour améliorer la stabilité de fonctionnement | Oui | Non |
| LED bleues (fonction supplémentaire) | 8 | 0 |
Spécifications
- Plage de sortie : 5–300 cm (La valeur de sortie est de 300 lorsque la distance détectée est hors de la plage de sortie.)
- Erreur de valeur de sortie : ±5%
Principe de fonctionnement
Les êtres humains peuvent entendre des sons de 20 à 20 000 Hz. Les ondes sonores avec des fréquences supérieures à 20 000 Hz sont appelées ondes ultrasonores. Les ondes sonores sont renvoyées par les obstacles qu'elles rencontrent et sont reçues par le récepteur du capteur ultrasonique. En se basant sur le temps entre la transmission et la réception, les distances entre le capteur ultrasonique et les obstacles peuvent être calculées.
Exemple de la vie réelle
- Les chauves-souris localisent les objets avec des ondes ultrasonores.
Guide de programmation
Vous pouvez utiliser mBlock 5 pour programmer le capteur ultrasonique 2. Connectez le capteur ultrasonique 2 à CyberPi, ajoutez CyberPi et connectez-le à mBlock 5, puis ajoutez l'extension Capteur ultrasonique 2. Pour plus de détails sur la façon d'ajouter CyberPi et de le connecter à mBlock 5 et sur la façon d'ajouter l'extension, consultez "Ajouter et connecter mBot2" et "Ajouter des extensions".
Détection et détermination de la distance
Pour obtenir la distance entre l'obstacle et le capteur ultrasonique 2, utilisez :

Pour déterminer si un obstacle est trouvé dans la plage de sortie de 5 cm à 300 cm, utilisez :

Généralement, les fonctions de détection et de détermination de la distance sont utilisées pour mettre en œuvre l'évitement des obstacles. Par exemple :
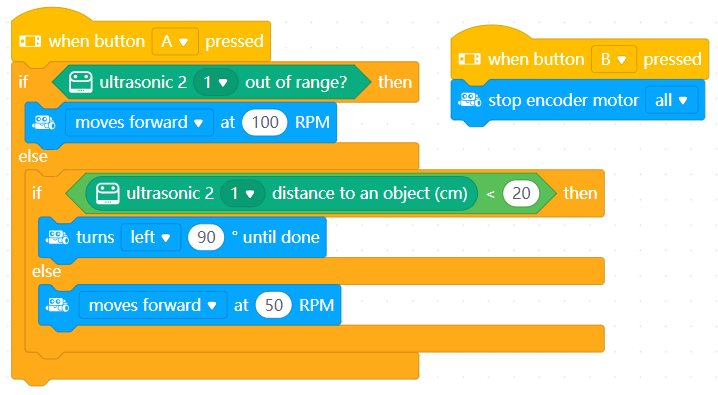
Lorsqu'aucun obstacle n'est détecté dans la plage de détection du capteur ultrasonique 2, mBot2 avance à la vitesse de 100 tours par minute ; lorsqu'un obstacle est détecté, il avance à la vitesse de 50 tours par minute ; et lorsque la distance entre l'obstacle et lui est inférieure à 20 cm, il tourne à gauche.
Expression d'émotions et d'informations
Le capteur ultrasonique 2 est équipé de huit LED bleues. En programmant leur luminosité, vous pouvez utiliser le capteur ultrasonique 2 pour exprimer différents types d'émotions et d'informations.
Exemple 1 :
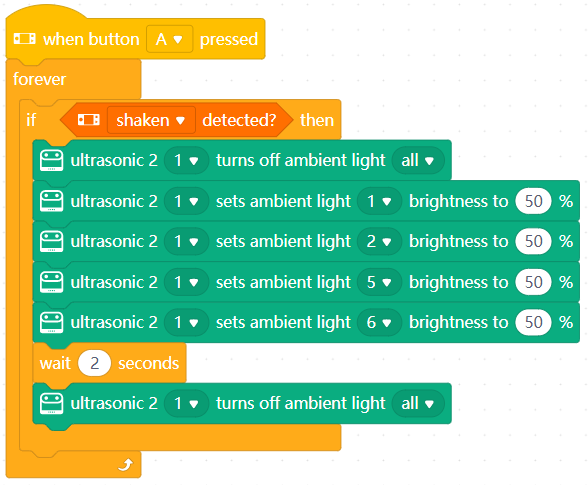
Après avoir appuyé sur le bouton A, le capteur ultrasonique 2 exprime l'émotion de bonheur en "souriant" lorsque vous le secouez. :::info Remarque : Dans cet exemple, le "sourire" est effectué en allumant les LED bleues aux positions 1, 2, 5 et 6 et en éteignant celles aux positions 3, 4, 7 et 8. :::
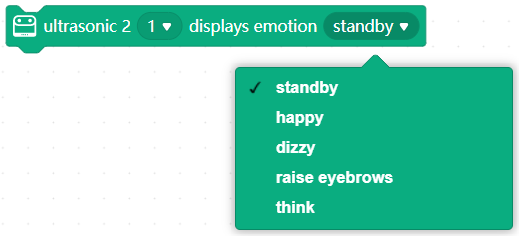
Alternativement, vous pouvez utiliser le bloc d'émotion fourni sur mBlock 5 pour exprimer une émotion :
Exemple 2 :

Après avoir appuyé sur le bouton A, placez un obstacle près du capteur
ultrasonique 2, puis éloignez lentement l'obstacle de celui-ci. Vous pouvez voir que les LED bleues deviennent plus lumineuses à mesure que vous éloignez l'obstacle. Une luminosité plus élevée indique une plus grande distance.
- Original: Ultrasonic Sensor 2