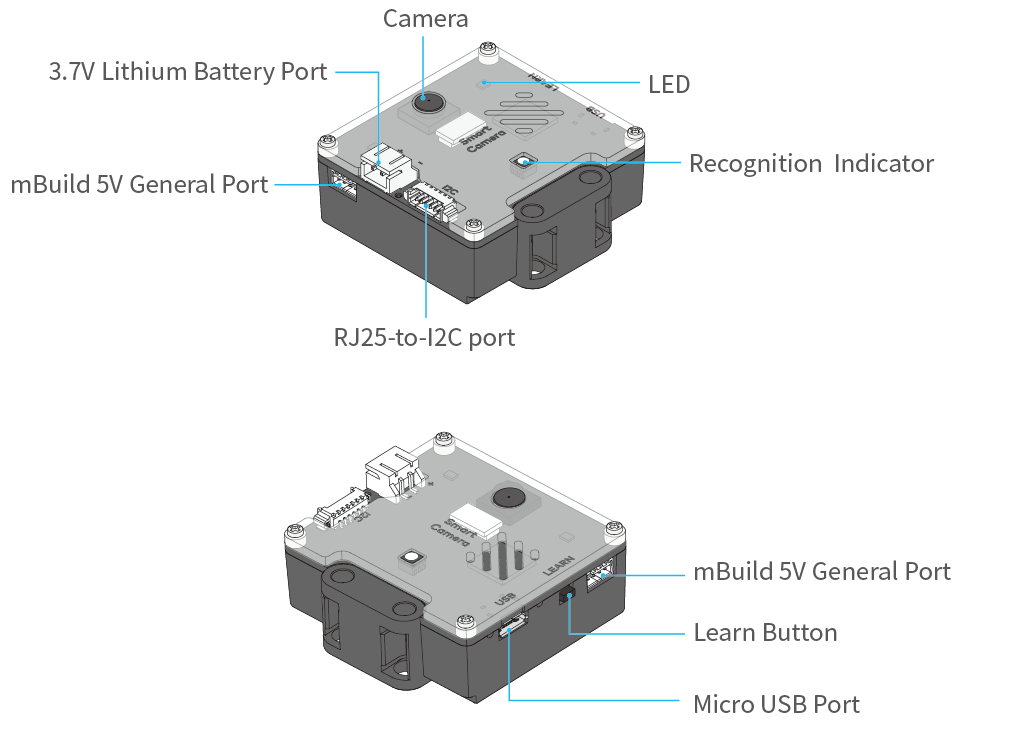
Caméra Intelligente
La caméra intelligente peut apprendre et reconnaître des objets de couleurs vives ainsi que détecter les codes-barres et les lignes, ce qui lui permet d'être utilisée dans divers scénarios d'application, tels que le tri des déchets, le transport intelligent, le suivi d'objets et le suivi intelligent de lignes.
Connexion à mBot ou Halocode
En fonction du mode de câblage, la caméra intelligente peut être utilisée comme un module électronique RJ25 ou un module électronique mBuild. Après l'avoir connectée à mBot ou Halocode, vous pouvez la contrôler via mBot ou Halocode.
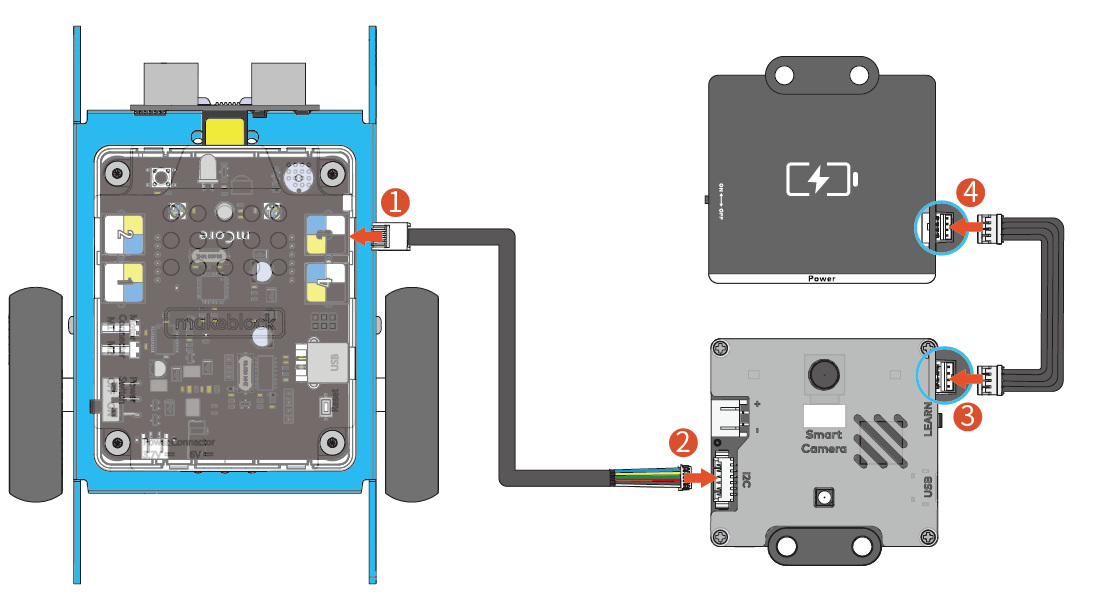
Connexion à mBot
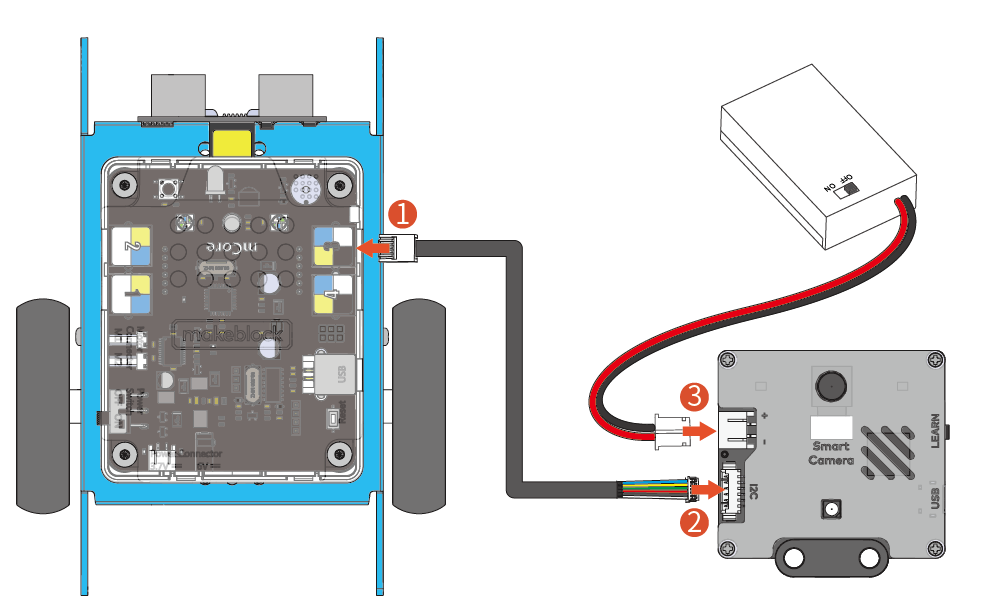
Après avoir connecté la caméra intelligente à mBot, vous pouvez l'alimenter avec une batterie lithium 3,7V ou le module d'alimentation mBuild.
Méthode 1 Alimentation via le module d'alimentation mBuild (recommandée)
Méthode 2 Alimentation via une batterie lithium 3,7V
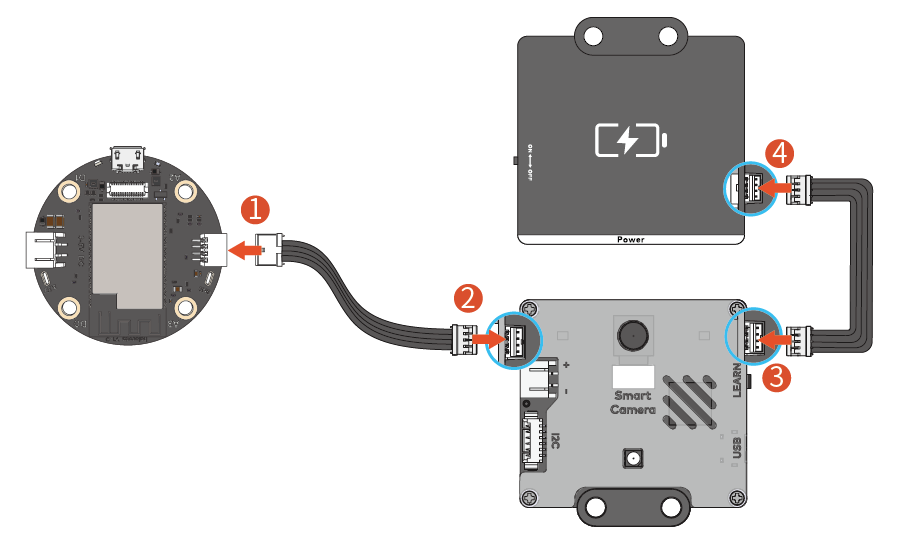
Connexion à Halocode
Remarque : Il est recommandé d'alimenter la caméra intelligente via le module d'alimentation mBuild. L'alimentation uniquement via le port USB peut affecter l'utilisation correcte du bloc.
Caractéristiques
Apprentissage des couleurs
La caméra intelligente peut apprendre les objets de couleur vive et identifier les blocs de couleur après l'apprentissage, puis renvoyer leurs coordonnées, longueur et largeur. Apprenez un objet coloré comme suit :
- Maintenez le bouton d'apprentissage enfoncé jusqu'à ce que le voyant devienne rouge (orange, jaune, vert, bleu ou violet, différentes couleurs indiquent l'apprentissage d'objets différents), puis relâchez le bouton.
- Placez le bloc de couleur à apprendre devant la caméra.
- Observez le voyant à l'avant ou à l'arrière de la caméra intelligente, et déplacez lentement l'objet à apprendre jusqu'à ce que la couleur du voyant corresponde à celle de l'objet.
- Appuyez brièvement sur le bouton d'apprentissage pour enregistrer l'objet appris actuel. Après que l'apprentissage a réussi, lorsque la caméra reconnaît un objet appris, la couleur du voyant devient la même que celle de l'objet appris.
Un maximum de sept objets peut être appris et enregistré dans ce mode.
| Action | Description |
|---|---|
| Maintien enfoncé jusqu'à ce que la lumière rouge s'allume | Commence à apprendre la couleur 1 |
| Maintien enfoncé jusqu'à ce que la lumière orange s'allume | Commence à apprendre la couleur 2 |
| Maintien enfoncé jusqu'à ce que la lumière jaune s'allume | Commence à apprendre la couleur 3 |
| Maintien enfoncé jusqu'à ce que la lumière verte s'allume | Commence à apprendre la couleur 4 |
| Maintien enfoncé jusqu'à ce que la lumière cyan s'allume | Commence à apprendre la couleur 5 |
| Maintien enfoncé jusqu'à ce que la lumière bleue s'allume | Commence à apprendre la couleur 6 |
| Maintien enfoncé jusqu'à ce que la lumière violette s'allume | Commence à apprendre la couleur 7 |
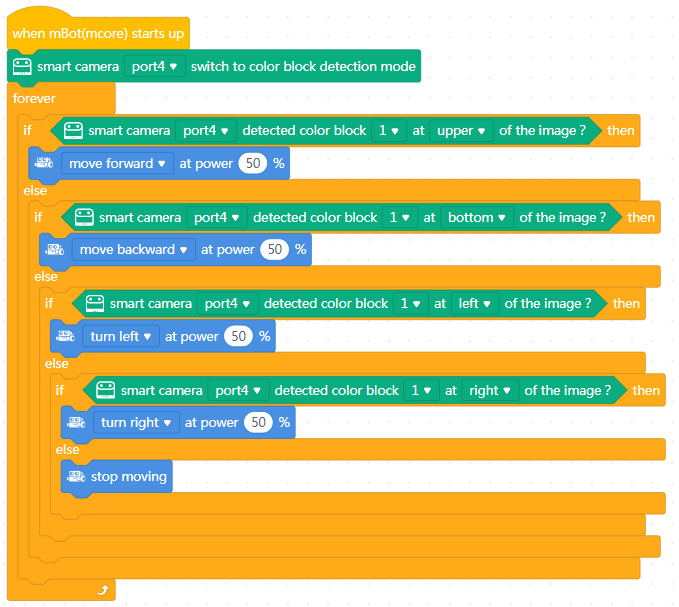
Après l'apprentissage, vous pouvez utiliser le programme suivant pour suivre le bloc de couleur (bloc de couleur 1).
Remarque
- Plus la couleur de l'objet appris est vive, plus la reconnaissance est précise.
Exemple d'avertissement : apprentissage d'une peluche panda

- La caméra intelligente peut apprendre et enregistrer sept objets, qui doivent être facilement distinguables par leur couleur.
Exemple d'avertissement : apprentissage d'une balle jaune et d'un chapeau jaune
 Bon exemple : apprentissage d'une balle orange et d'une balle verte
Bon exemple : apprentissage d'une balle orange et d'une balle verte

- Basculez la caméra intelligente en mode détection de blocs de couleur pour détecter les coordonnées et la taille du bloc de couleur.
- La caméra intelligente peut prévenir les interférences lumineuses. Cependant, une lumière changeante peut encore affecter la précision de la reconnaissance. Les résultats d'apprentissage précédents peuvent ne pas réussir à être utilisés dans un nouvel environnement. Voici quelques solutions:
- Réinitialisez la balance des blancs
- Allumez la LED avant l'apprentissage ou la reconnaissance
- Réglez les paramètres détaillés dans PixyMon
- Utilisez un abat-jour pour couvrir les blocs
Reconnaissance de codes-barres et de lignes
La caméra intelligente peut détecter simultanément les codes-barres, les lignes et les routes secondaires sans apprentissage.
Basculez la caméra intelligente en mode suivi de ligne/étiquette pour détecter et renvoyer les informations de coordonnées des codes-barres, des lignes et des routes secondaires.
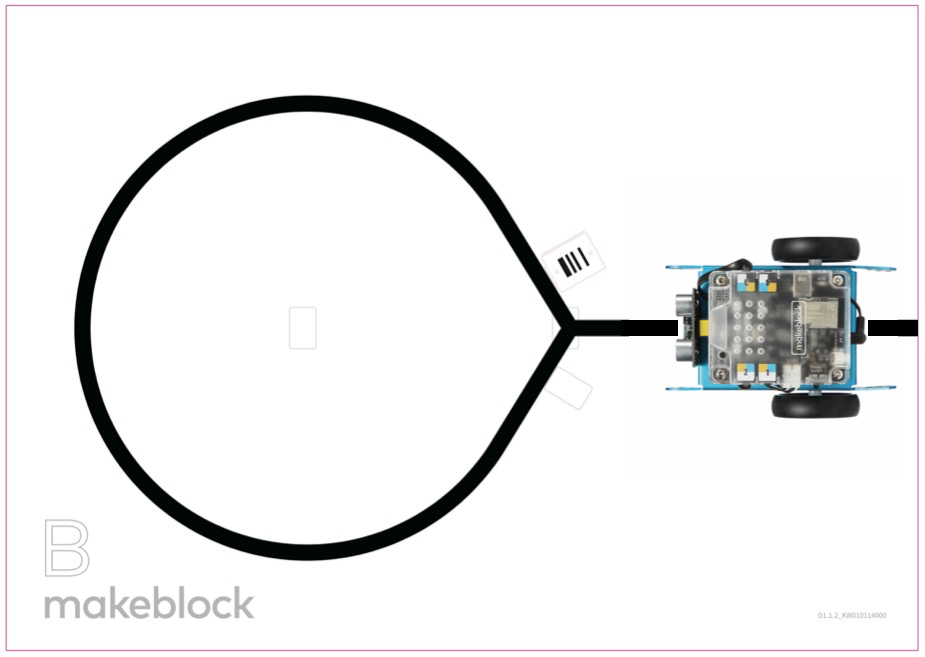
Reconnaissance des codes-barres
Des cartes et autocollants de codes-barres sont inclus dans le package. Cliquez pour télécharger les cartes de codes-barres. 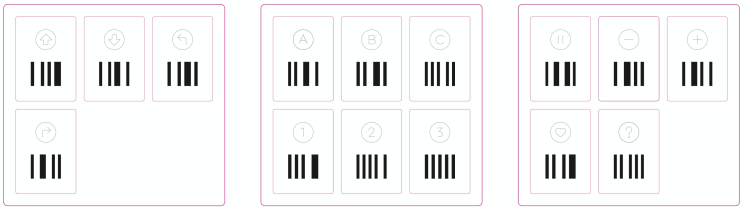 Vous pouvez placer les cartes sur la carte de suivi de ligne.
Vous pouvez placer les cartes sur la carte de suivi de ligne.
 Reconnaissance des lignes et des routes secondaires
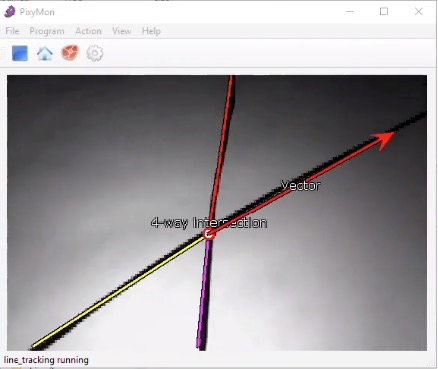
La caméra intelligente peut détecter les lignes et le nombre de routes secondaires, et renvoyer les coordonnées, directions et le nombre de routes secondaires.
Reconnaissance des lignes et des routes secondaires
La caméra intelligente peut détecter les lignes et le nombre de routes secondaires, et renvoyer les coordonnées, directions et le nombre de routes secondaires.
 Note
Note
- Vous pouvez définir le mode de suivi de ligne en ligne sombre sur clair ou ligne claire sur sombre dans le programme.
- La caméra intelligente filtrera par défaut les lignes étroites. Consultez le guide de l'utilisateur de PixyMon pour modifier les paramètres par défaut.
PixyMon
La caméra intelligente prend en charge le logiciel PixyMon. Vous pouvez utiliser PixyMon pour afficher l'écran de la caméra, ajuster les fonctions de la caméra intelligente et régler certains paramètres pour explorer des fonctionnalités plus complexes. Suivez les étapes ci-dessous pour installer et utiliser PixyMon :
- Cliquez sur les liens suivants pour télécharger PixyMon. Télécharger PixyMon pour Windows Télécharger PixyMon pour Mac
- Double-cliquez sur le package d'installation et suivez les instructions pour l'installer.
- Après l'installation, ouvrez PixyMon.
- Connectez la caméra intelligente à l'ordinateur via un câble USB.
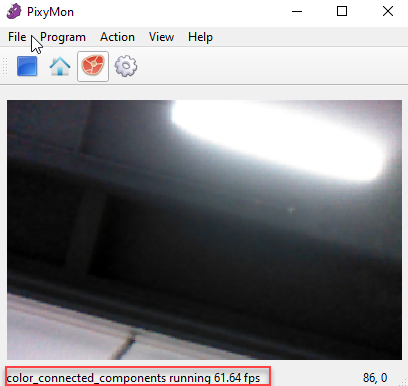
- Après avoir vu la barre d'état indiquant connecté comme indiqué ci-dessous, vous pouvez commencer à explorer la caméra intelligente avec PixyMon.
 Remarque : Pour faciliter l'utilisation du module, nous n'avons pas développé de nombreuses fonctions sur les blocs. Si vous souhaitez contrôler la caméra intelligente via les blocs pour implémenter plus de fonctionnalités, utilisez le Constructeur d'Extensions mBlock 5.
Documentation du Constructeur d'Extensions mBlock
Remarque : Pour faciliter l'utilisation du module, nous n'avons pas développé de nombreuses fonctions sur les blocs. Si vous souhaitez contrôler la caméra intelligente via les blocs pour implémenter plus de fonctionnalités, utilisez le Constructeur d'Extensions mBlock 5.
Documentation du Constructeur d'Extensions mBlock
Paramètres
- Dimensions : 48 × 48 (mm)
- Résolution : 640 x 480
- Champ de vision : 65.0 degrés
- Longueur focale effective : 4.65±5% mm
- Vitesse de reconnaissance : 60 ips
- Distance de reconnaissance : 0.25–1.2 (m)
- Résistance à la chute : 1m
- Alimentation : Batterie lithium 3,7V ou module d'alimentation mBuild 5V
- Plage de consommation électrique : 0.9–1.3W
- Température de fonctionnement : -10℃–55℃
Programmes d'exemple
Programmes d'exemple de caméra intelligente
Exemple 1 : Suivi de blocs de couleur 1 – Suivi de la position des blocs de couleur
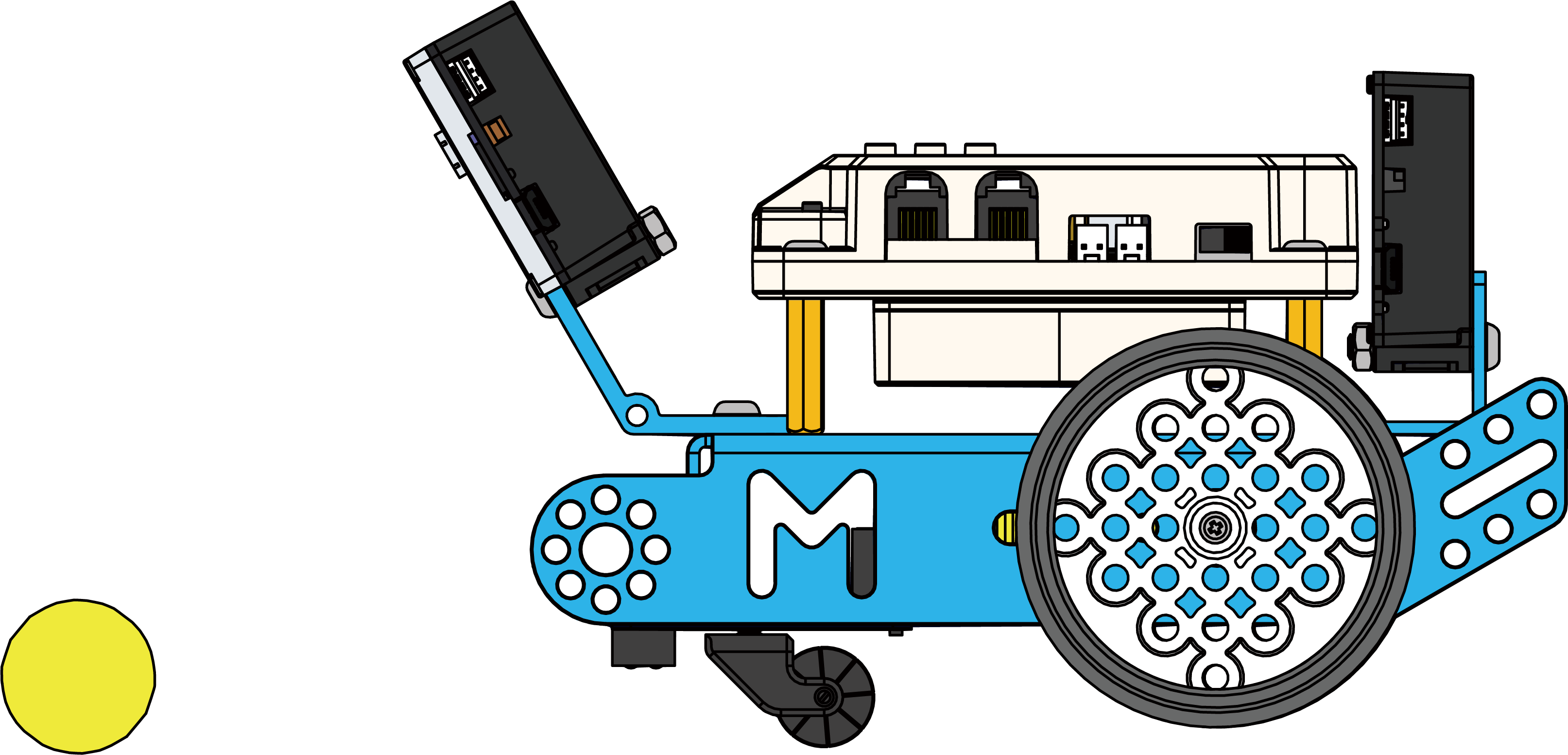
Dans cet exemple, mBot se déplace en suivant le bloc de couleur spécifié. Les moteurs tournent en fonction de la position du bloc de couleur dans l'image capturée par la caméra intelligente. Ils cessent de tourner lorsque le bloc de couleur est détecté au centre de l'image ou lorsqu'aucun bloc de couleur n'est détecté.
Notez que la manière dont vous installez la caméra intelligente affecte le suivi du bloc de couleur et donc le mouvement de mBot. La figure suivante montre un exemple de la manière dont la caméra intelligente peut être installée.
Détails du programme

Exemple 2 : Suivi de blocs de couleur 2 – Suivi des coordonnées des blocs de couleur
Dans cet exemple, la position (définie comme A) du bloc de couleur dans l'image capturée est obtenue, et la position cible est définie comme B. Les moteurs tournent en fonction de la différence entre A et B, où la différence est calculée en fonction des coordonnées de A et B. De cette manière, un suivi plus précis est effectué. La manière dont mBot se déplace en suivant les coordonnées des blocs de couleur est similaire à celle dont il se déplace en suivant les positions des blocs de couleur.
Détails du programme

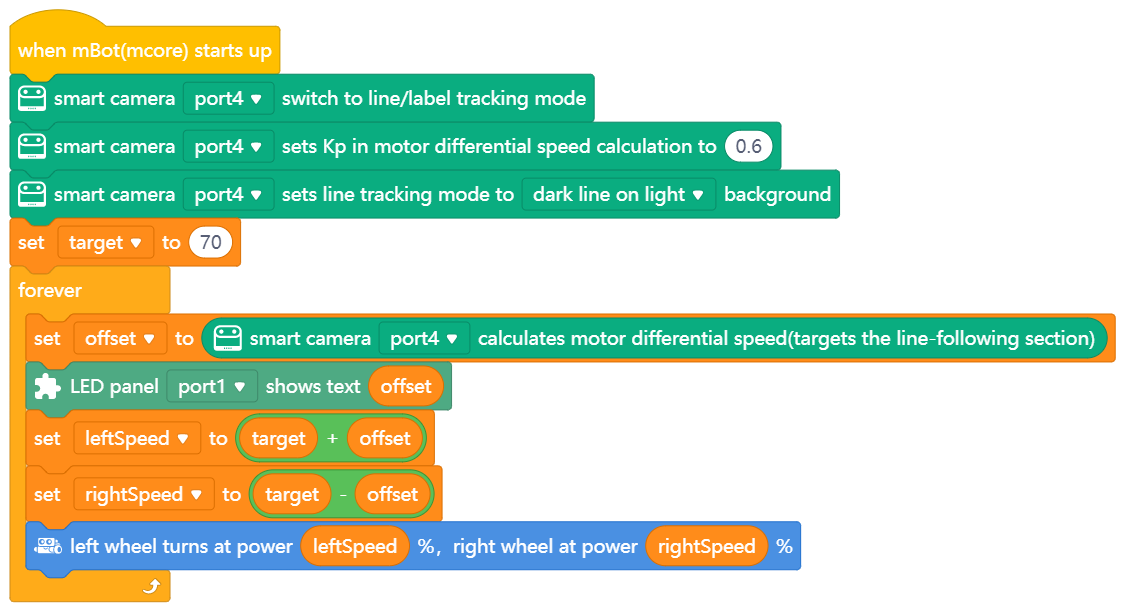
Exemple 3 : Suivi de ligne
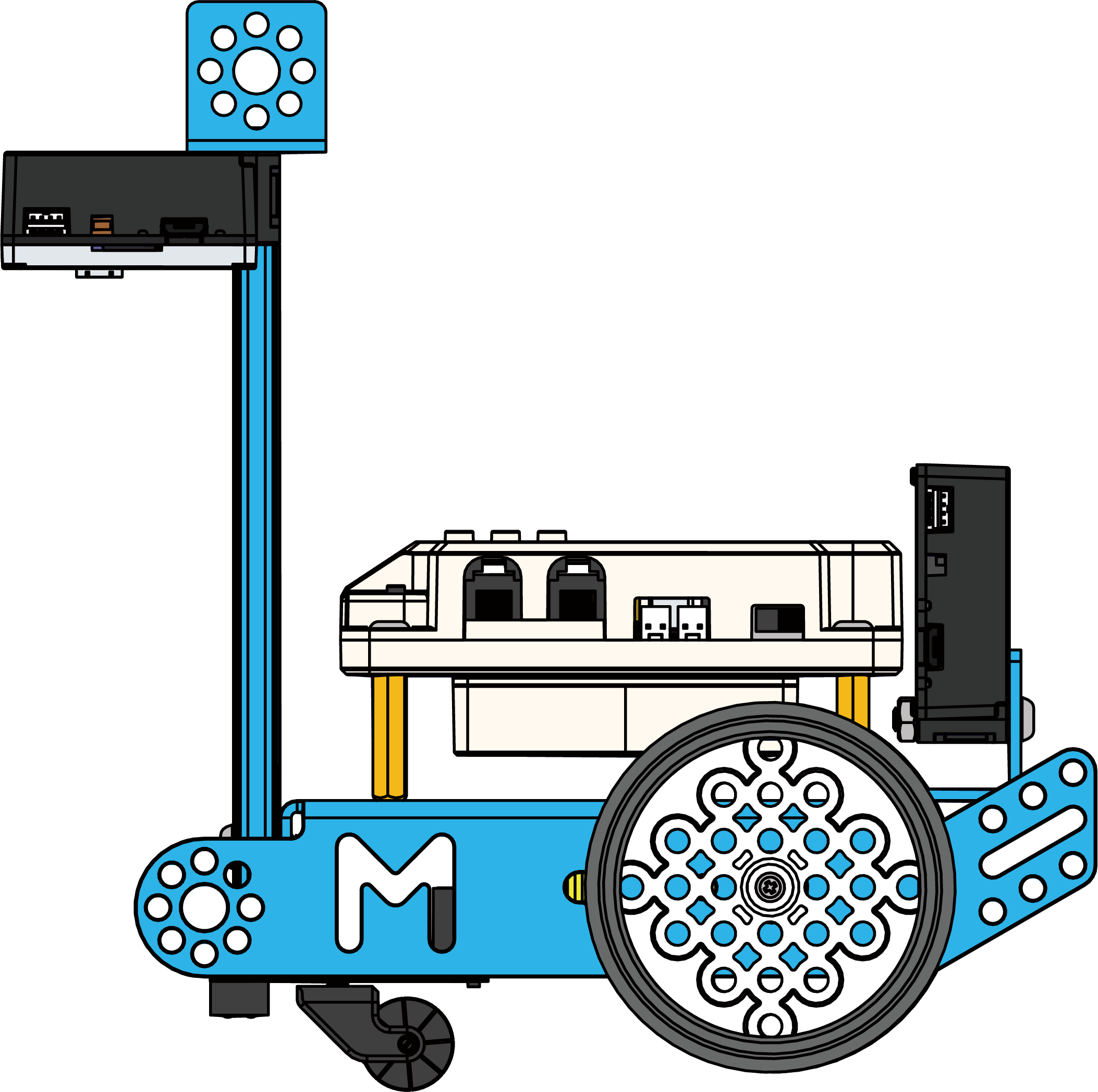
La caméra intelligente peut reconnaître les segments de ligne. Les moteurs tournent en fonction de la vitesse différentielle calculée en fonction de l'écart du segment de ligne par rapport au centre de l'image capturée.
En mode de suivi de ligne, il est recommandé d'installer la caméra intelligente parallèlement au segment de ligne à reconnaître.
Détails du programme
 **Remarque : **
**Remarque : **
- Kp : Sensibilité dans la prise de virage. Lorsque la vitesse initiale est plus élevée ou que le virage est plus prononcé, un Kp plus grand est nécessaire.
- cible : vitesse initiale
- offset : écart par rapport à la ligne à suivre. Une valeur positive indique un écart vers la gauche de la ligne, et une valeur négative indique un écart vers la droite de la ligne.