Capteur RGB quadruple
Le capteur RGB quadruple utilise la lumière visible comme source de remplissage, ce qui réduit considérablement les interférences de la lumière ambiante. De plus, il offre la fonction de reconnaissance des couleurs. La nouvelle fonction de calibration de la lumière ambiante réduit également les interférences de la lumière ambiante lors du suivi de ligne. Avec quatre capteurs de lumière, il peut prendre en charge plus de scénarios de programmation.
| Capteur RGB quadruple | Capteur de couleur RGB double | |
|---|---|---|
| Boîtier en plastique pour améliorer la durabilité et la qualité | Oui | Non |
| Capteur de suivi de ligne | 4 | 2 |
| Capteur de couleur | 4 | |
| (qui servent également de capteurs de suivi de ligne) | Non | |
| Capteur de lumière | 4 | |
| (qui servent également de capteurs de suivi de ligne) | Non | |
| Lumière de remplissage | Lumière visible | Lumière infrarouge |
| Calibration de la lumière ambiante pour réduire significativement les interférences de la lumière ambiante | Oui | Non |
Spécifications
Plage de détection : 5–15 mm de l'objet à détecter
Description du bouton
- Double pression : Lorsque le bouton est pressé deux fois, le capteur RGB quadruple commence à apprendre l'arrière-plan et la ligne pour le suivi de ligne.
Placez les capteurs de lumière sur l'arrière-plan de la carte de suivi de ligne et appuyez deux fois sur le bouton. Lorsque vous voyez les LEDs indiquer l'état de suivi de ligne clignoter rapidement, balancez les capteurs de gauche à droite au-dessus de l'arrière-plan et de la ligne jusqu'à ce que les LEDs arrêtent de clignoter. Cela prend environ 2,5 secondes. Les valeurs des paramètres obtenues sont automatiquement stockées. Si l'apprentissage échoue, les LEDs clignotent lentement, et vous devez recommencer l'apprentissage.
- Appui long : Lorsque le bouton est pressé longuement, le capteur RGB quadruple change la couleur des lumières de remplissage. En général, vous n'avez pas besoin de changer la couleur. La couleur est définie automatiquement après que l'apprentissage est terminé.
Guide de programmation
Vous pouvez utiliser mBlock 5 pour programmer le capteur RGB quadruple. Connectez le capteur RGB quadruple à CyberPi, ajoutez CyberPi et connectez-le à mBlock 5, puis ajoutez l'extension Quad RGB Sensor. Pour plus de détails sur la façon d'ajouter CyberPi et de le connecter à mBlock 5 et sur la façon d'ajouter l'extension, voir "Ajouter et connecter mBot2" et "Ajouter des extensions."
Définir le mode de détection
Le capteur RGB quadruple peut être programmé pour détecter l'une des deux options suivantes :
- couleur
- niveaux de gris
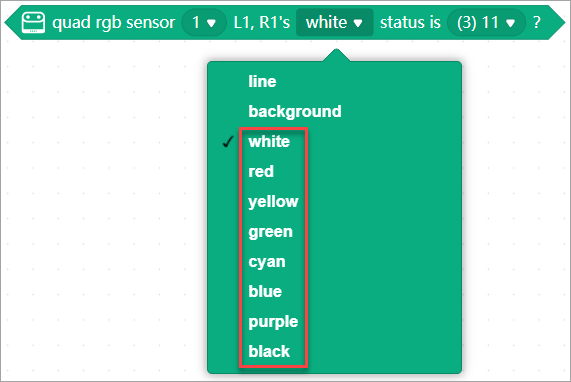
Pour la détection des couleurs, le capteur RGB quadruple mesure la lumière réfléchie par un objet en termes de ses valeurs Rouge, Vert et Bleu (RVB). Huit couleurs sont disponibles.
Pour détecter une couleur, vous devez sélectionner une couleur dans le bloc à utiliser, par exemple :
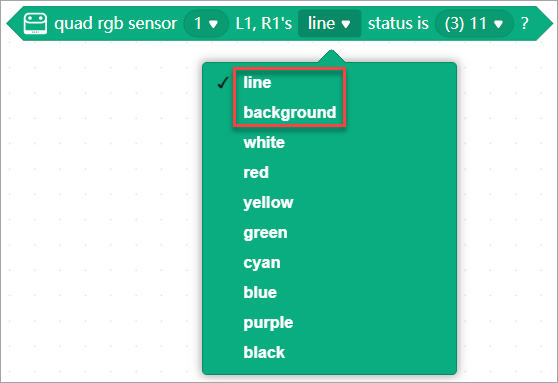
Pour la détection des niveaux de gris, le capteur RGB quadruple mesure l'intensité de la lumière réfléchie par un objet indépendamment de sa couleur.
Pour détecter le niveau de gris, vous devez sélectionner ligne ou arrière-plan dans le bloc à utiliser, par exemple :
Obtenir les valeurs de sortie
Le capteur RGB quadruple peut produire des valeurs basées sur la couleur ou le niveau de gris qu'il détecte, et vous pouvez obtenir ces valeurs en utilisant les blocs reporters, par exemple :

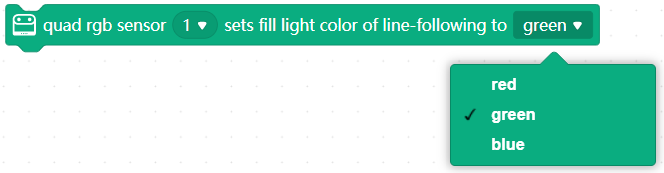
Changer la couleur des lumières de remplissage
Vous pouvez changer la couleur des lumières de remplissage entre vert, rouge et bleu en appuyant longuement sur le bouton ou en utilisant le bloc suivant :
:::info Remarque : Le capteur RGB quadruple peut détecter les couleurs indépendamment des couleurs des lumières de remplissage. :::
Vous devez changer la couleur des lumières de remplissage dans certains scénarios d'application. Pour plus de détails, voir "Scénarios de détection de ligne."
Scénarios de détection de ligne
Avant d'utiliser le capteur RGB quadruple pour détecter des lignes, vous devez effectuer une calibration de base sur celui-ci.
Calibration de base
- Placez les quatre capteurs de lumière du capteur RGB quadruple sur l'arrière-plan et appuyez deux fois sur le bouton du capteur, puis balancez le capteur horizontalement sur la ligne et l'arrière-plan.
- Vérifiez les deux capteurs de lumière au milieu (L1 et R1) du capteur RGB quadruple. Si le robot est sur la ligne, les LEDs bleues des deux capteurs de lumière doivent être éteintes. Les deux LEDs s'allument et s'éteignent alternativement lorsque vous balancez le robot sur la ligne. :::tips Conseils : Le capteur RGB quadruple peut détecter les lignes sombres sur des arrière-plans clairs indépendamment de la couleur de l'éclairage. :::
Les scénarios de détection de ligne suivants décrivent plusieurs scénarios, et les objectifs et blocs recommandés pour chaque scénario.
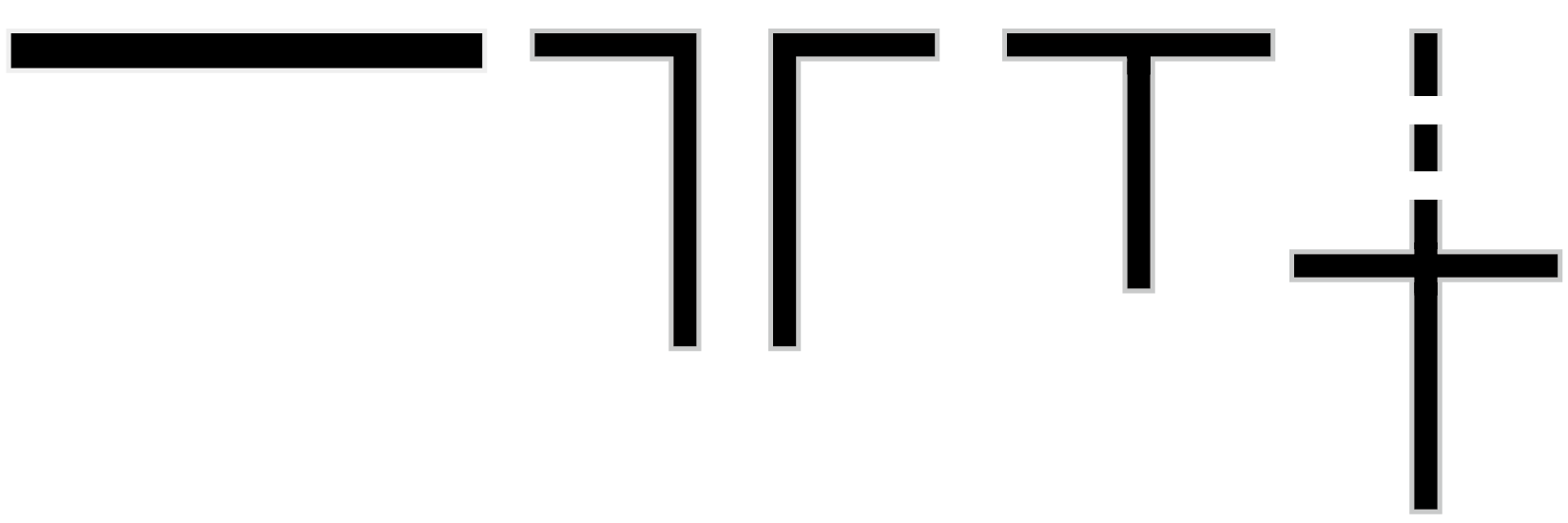
Scénario 1 : Ligne noire + marge blanche autour de la ligne + fond blanc
Par exemple :
 Effectuez une calibration de base sur le capteur RGB quadruple, afin qu'il puisse reconnaître la ligne et l'arrière-plan.
Effectuez une calibration de base sur le capteur RGB quadruple, afin qu'il puisse reconnaître la ligne et l'arrière-plan.
| Niveau | Objectif(s) et bloc(s) recommandé(s) | Remarques |
|---|---|---|
| 1a: débutant |
- Pour déterminer si le capteur RGB quadruple détecte l'état spécifique de la ligne :
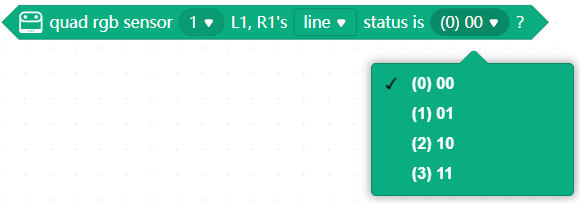
- Pour obtenir l'état de la ligne détectée
 |
|
| 1b: intermédiaire |
|
|
| 1b: intermédiaire |  Pour détecter les croisements
Pour détecter les croisements
 | Le capteur RGB quadruple ne peut pas ignorer la ligne, et donc il ne peut pas déterminer si une intersection est réellement un croisement ("+" forme, la ligne réelle continue après la T). Ceci peut seulement être vérifié en roulant droit sur la T et en détectant si la ligne continue. |
| 1c: avancé | Pour mettre en œuvre un suivi de ligne fluide :
| Le capteur RGB quadruple ne peut pas ignorer la ligne, et donc il ne peut pas déterminer si une intersection est réellement un croisement ("+" forme, la ligne réelle continue après la T). Ceci peut seulement être vérifié en roulant droit sur la T et en détectant si la ligne continue. |
| 1c: avancé | Pour mettre en œuvre un suivi de ligne fluide :
 | Vérifiez la valeur de sortie de ce bloc.
Changez la couleur des lumières de remplissage pour vous assurer que la valeur de sortie est 0 lorsque le robot est au milieu de la ligne.
La couleur de la lumière de remplissage peut avoir un léger impact sur la valeur de sortie. |
| Vérifiez la valeur de sortie de ce bloc.
Changez la couleur des lumières de remplissage pour vous assurer que la valeur de sortie est 0 lorsque le robot est au milieu de la ligne.
La couleur de la lumière de remplissage peut avoir un léger impact sur la valeur de sortie. |
Scénario 2 : Ligne noire avec des sections colorées + marge blanche autour de la ligne + fond blanc
Par exemple :
 Les objectifs et blocs recommandés sont les mêmes que ceux du Scénario 1, mais une calibration spéciale est nécessaire.
L'une des méthodes suivantes peut être utilisée :
Les objectifs et blocs recommandés sont les mêmes que ceux du Scénario 1, mais une calibration spéciale est nécessaire.
L'une des méthodes suivantes peut être utilisée :
-
Effectuez la calibration de base sur la couleur la plus claire parmi les sections colorées, par exemple, jaune, de sorte que toutes les couleurs plus sombres soient reconnues comme noires.
-
Effectuez une calibration de base sur la ligne noire, puis appuyez longuement sur le bouton du capteur pour changer la couleur des lumières de remplissage et voir si le capteur reconnaît les différentes sections colorées comme la ligne à suivre.
- section rouge : utilisez les lumières de remplissage vertes ou bleues/blanches
- section jaune : utilisez les lumières de remplissage bleues/blanches
- sections verte et bleue : toutes les lumières de remplissage fonctionnent :::warning Important à savoir :
-
Si vous avez défini la couleur des lumières de remplissage sur mBlock 5, la calibration réinitialise les lumières de remplissage (chaque lumière de remplissage passe rapidement par l'illumination R/G/B).
-
Les sections colorées à l'intérieur de la ligne à suivre peuvent affecter le suivi de ligne avancé et fluide (reconnu comme l'écart par rapport à la ligne). Par exemple, lorsque la calibration de base est effectuée sur la section jaune, la section bleue peut être signalée comme un écart même si elle est à 100% sur la ligne. :::
Scénario 3 : Ligne monocolore + marge blanche autour de la ligne + fond blanc
Par exemple :
 Effectuez une calibration de base sur le capteur RGB quadruple, afin qu'il puisse reconnaître la ligne et l'arrière-plan.
Les objectifs et blocs recommandés sont les mêmes que ceux du Scénario 1.
:::info
Remarques :
Effectuez une calibration de base sur le capteur RGB quadruple, afin qu'il puisse reconnaître la ligne et l'arrière-plan.
Les objectifs et blocs recommandés sont les mêmes que ceux du Scénario 1.
:::info
Remarques :
- Si vous utilisez le bloc de reporting de l'écart, appuyez longuement sur le bouton du capteur RGB quadruple pour changer la couleur des lumières de remplissage pour vous assurer que la valeur de sortie est 0 lorsque vous placez le robot au milieu de la ligne.
- Il n'est pas recommandé d'utiliser le bloc de reporting de l'écart lorsque le contraste entre la ligne et l'arrière-plan est faible. :::
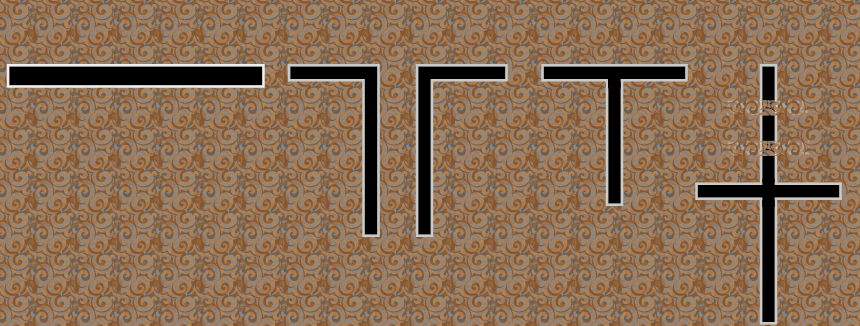
Scénario 4 : Ligne noire + marge blanche autour de la ligne + fond coloré/illustrations
Par exemple :
 Effectuez une calibration de base sur le capteur RGB quadruple, afin qu'il puisse reconnaître la ligne et l'arrière-plan.
Effectuez une calibration de base sur le capteur RGB quadruple, afin qu'il puisse reconnaître la ligne et l'arrière-plan.
| Niveau | Objectif(s) et bloc(s) recommandé(s) | Remarques |
|---|---|---|
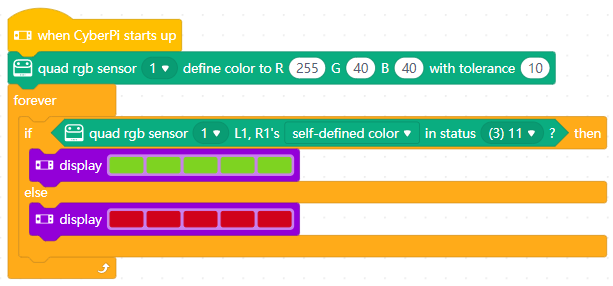
| 4a: débutant |
- Pour déterminer si le capteur RGB quadruple détecte l'état spécifique de la ligne :
- Pour obtenir l'état de la ligne détectée
 |
|
| 4b: intermédiaire |
|
|
| 4b: intermédiaire |  Pour détecter les croisements :
Pour détecter les croisements :
 | Les zones extérieures (arrière-plan) peuvent être reconnues comme la ligne à suivre, en fonction des conditions d'éclairage.
| Les zones extérieures (arrière-plan) peuvent être reconnues comme la ligne à suivre, en fonction des conditions d'éclairage.
Lorsque cela se produit, vous pouvez utiliser uniquement les capteurs de lumière L1 et R1 pour détecter les lignes, ou vous assurer que la marge blanche autour de la ligne est suffisamment large pour empêcher les capteurs de détecter l'arrière-plan extérieur. |
| 4c: avancé | Pour détecter l'écart par rapport à la ligne :
 | Si les couleurs des zones extérieures sont suffisamment proches de la couleur de la ligne à suivre, la valeur de sortie du bloc de reporting de l'écart peut être affectée, et la détection de l'écart peut ne pas être fiable. |
| Si les couleurs des zones extérieures sont suffisamment proches de la couleur de la ligne à suivre, la valeur de sortie du bloc de reporting de l'écart peut être affectée, et la détection de l'écart peut ne pas être fiable. |
Scénario 5 : Ligne noire + marge blanche autour de la ligne + fond réfléchissant
Par exemple :
 Effectuez une calibration de base sur le capteur RGB quadruple, afin qu'il puisse reconnaître la ligne et l'arrière-plan.
Les objectifs et blocs recommandés sont les mêmes que ceux du Scénario 1.
:::info
Remarques :
Effectuez une calibration de base sur le capteur RGB quadruple, afin qu'il puisse reconnaître la ligne et l'arrière-plan.
Les objectifs et blocs recommandés sont les mêmes que ceux du Scénario 1.
:::info
Remarques :
- L'arrière-plan réfléchissant peut refléter la lumière, ce qui peut affecter la détection de la ligne. Lorsque cela se produit, utilisez une bande de ruban adhésif noire sur les zones réfléchissantes pour améliorer la détection de la ligne.
- Si la ligne n'est pas reconnue, vérifiez si elle est trop réfléchissante et utilisez une bande de ruban adhésif noire pour améliorer la détection de la ligne. :::
Scénario 6 : Ligne noire + marge noire autour de la ligne + fond blanc
Par exemple :
 Effectuez une calibration de base sur le capteur RGB quadruple, afin qu'il puisse reconnaître la ligne et l'arrière-plan.
Effectuez une calibration de base sur le capteur RGB quadruple, afin qu'il puisse reconnaître la ligne et l'arrière-plan.
| Niveau | Objectif(s) et bloc(s) recommandé(s) | Remarques |
|---|---|---|
| 6a: débutant |
- Pour déterminer si le capteur RGB quadruple détecte l'état spécifique de la ligne :

- Pour obtenir l'état de la ligne détectée
 |
|
| 6b: intermédiaire |
|
|
| 6b: intermédiaire |  Pour détecter les croisements :
| Les zones extérieures (arrière-plan) peuvent être reconnues comme la ligne à suivre, en fonction des conditions d'éclairage.
Pour détecter les croisements :
| Les zones extérieures (arrière-plan) peuvent être reconnues comme la ligne à suivre, en fonction des conditions d'éclairage.
Lorsque cela se produit, vous pouvez utiliser uniquement les capteurs de lumière L1 et R1 pour détecter les lignes, ou vous assurer que la marge blanche autour de la ligne est suffisamment large pour empêcher les capteurs de détecter l'arrière-plan extérieur. |
| 6c: avancé | Pour détecter l'écart par rapport à la ligne :
| Si les couleurs des zones extérieures sont suffisamment proches de la couleur de la ligne à suivre, la valeur de sortie du bloc de reporting de l'écart peut être affectée, et la détection de l'écart peut ne pas être fiable. |
Scénario 7 : Ligne noire + marge blanche autour de la ligne + fond réfléchissant + variations de luminosité
Par exemple :
 Effectuez une calibration de base sur le capteur RGB quadruple, afin qu'il puisse reconnaître la ligne et l'arrière-plan.
Effectuez une calibration de base sur le capteur RGB quadruple, afin qu'il puisse reconnaître la ligne et l'arrière-plan.
| Niveau | Objectif(s) et bloc(s) recommandé(s) | Remarques |
|---|---|---|
| 7a: débutant |
- Pour déterminer si le capteur RGB quadruple détecte l'état spécifique de la ligne :

- Pour obtenir l'état de la ligne détectée
 |
|
| 7b: intermédiaire |
Pour détecter les croisements :
| Les zones extérieures (arrière-plan) peuvent être reconnues comme la ligne à suivre, en fonction des conditions d'éclairage.
|
|
| 7b: intermédiaire |
Pour détecter les croisements :
| Les zones extérieures (arrière-plan) peuvent être reconnues comme la ligne à suivre, en fonction des conditions d'éclairage.
Lorsque cela se produit, vous pouvez utiliser uniquement les capteurs de lumière L1 et R1 pour détecter les lignes, ou vous assurer que la marge blanche autour de la ligne est suffisamment large pour empêcher les capteurs de détecter l'arrière-plan extérieur. |
| 7c: avancé | Pour détecter l'écart par rapport à la ligne :
| Si les couleurs des zones extérieures sont suffisamment proches de la couleur de la ligne à suivre, la valeur de sortie du bloc de reporting de l'écart peut être affectée, et la détection de l'écart peut ne pas être fiable. |
Scénario 8 : Ligne monocolore + marge blanche autour de la ligne + fond coloré + variations de luminosité
Par exemple :
 Effectuez une calibration de base sur le capteur RGB quadruple, afin qu'il puisse reconnaître la ligne et l'arrière-plan.
Les objectifs et blocs recommandés sont les mêmes que ceux du Scénario 1.
:::info
Remarques :
Effectuez une calibration de base sur le capteur RGB quadruple, afin qu'il puisse reconnaître la ligne et l'arrière-plan.
Les objectifs et blocs recommandés sont les mêmes que ceux du Scénario 1.
:::info
Remarques :
- L'arrière-plan coloré et les variations de luminosité peuvent affecter la détection de la ligne. Lorsque cela se produit, vérifiez si la couleur de l'éclairage de remplissage est uniforme et si la couleur de la ligne à suivre est suffisamment contrastée par rapport à l'arrière-plan.
- Si la ligne n'est pas reconnue, essayez de changer la couleur des lumières de remplissage et répétez le processus de calibration de base. :::
FAQ
Pourquoi les lumières de remplissage clignotent-elles rapidement sur un mélange de couleurs ?
Lorsque les lumières de remplissage passent rapidement par l'illumination R/G/B, cela signifie que les lumières de remplissage sont réinitialisées. Cela se produit lorsque vous effectuez une calibration de base, et lorsque vous définissez la couleur des lumières de remplissage sur mBlock 5, ce qui peut affecter les valeurs de sortie du capteur RGB quadruple.
Pourquoi le capteur RGB quadruple ne détecte-t-il pas la ligne ?
Si le capteur RGB quadruple ne détecte pas la ligne, vérifiez les points suivants :
- Vérifiez si la ligne est suffisamment contrastée par rapport à l'arrière-plan, et essayez de modifier la couleur des lumières de remplissage.
- Vérifiez si la ligne est trop réfléchissante ou trop sombre. Si c'est le cas, utilisez une bande de ruban adhésif noire sur la ligne réfléchissante pour améliorer la détection de la ligne.
- Vérifiez si la couleur de la lumière de remplissage affecte la valeur de sortie du capteur RGB quadruple.
- Assurez-vous que le capteur RGB quadruple est placé au-dessus de la ligne de manière équilibrée. Si ce n'est pas le cas, il peut ne pas être capable de détecter la ligne.
- Si la ligne est fine ou s'il y a des variations de luminosité dans l'environnement, cela peut affecter la détection de la ligne.
Pourquoi le capteur RGB quadruple détecte-t-il l'arrière-plan extérieur comme la ligne ?
Lorsque l'arrière-plan extérieur est reconnu comme la ligne à suivre, vérifiez les points suivants :
- Vérifiez si la marge blanche autour de la ligne est suffisamment large pour empêcher les capteurs de détecter l'arrière-plan extérieur.
- Vérifiez si les zones extérieures sont suffisamment sombres et si la ligne est suffisamment lumineuse pour être reconnue comme la ligne à suivre.
- Essayez de changer la couleur des lumières de remplissage et répétez le processus de calibration de base.
- Si cela se produit dans des conditions de faible luminosité, augmentez la luminosité de l'environnement.
Pourquoi la détection de l'écart par rapport à la ligne est-elle affectée ?
Si la détection de l'écart par rapport à la ligne est affectée, vérifiez les points suivants :
- Vérifiez si la couleur des zones extérieures est suffisamment proche de la couleur de la ligne à suivre. Si c'est le cas, la valeur de sortie du bloc de reporting de l'écart peut être affectée, et la détection de l'écart peut ne pas être fiable.
- Essayez de changer la couleur des lumières de remplissage et répétez le processus de calibration de base.
- Si la détection de l'écart est affectée par les variations de luminosité, assurez-vous que la luminosité de l'environnement est uniforme.
- Si la détection de l'écart est affectée par des sections colorées dans la ligne, utilisez une autre méthode de calibration pour améliorer la détection de la ligne.
Comment résoudre les problèmes de détection de la ligne dans des conditions de faible luminosité ?
Pour résoudre les problèmes de détection de la ligne dans des conditions de faible luminosité, vous pouvez :
- Augmenter la luminosité de l'environnement en ajoutant des sources de lumière supplémentaires.
- Utiliser des lumières de remplissage plus lumineuses ou changer la couleur des lumières de remplissage.
- Utiliser des bandes de ruban adhésif noires sur les zones réfléchissantes pour améliorer la détection de la ligne.
Ressources
Pour plus d'informations sur le capteur RGB quadruple, voir la page officielle. Pour plus de conseils de dépannage, voir "FAQ."